I want to cover why I have been designing gimbals with wire linkages, and discuss some of the potential advantages and disadvantages of some of the best alternate design options, and why I may start to adopt them.
Wire Linkage:
The main advantages of a a wire linkage are durability, flexible application, good performance, and ease of repair.
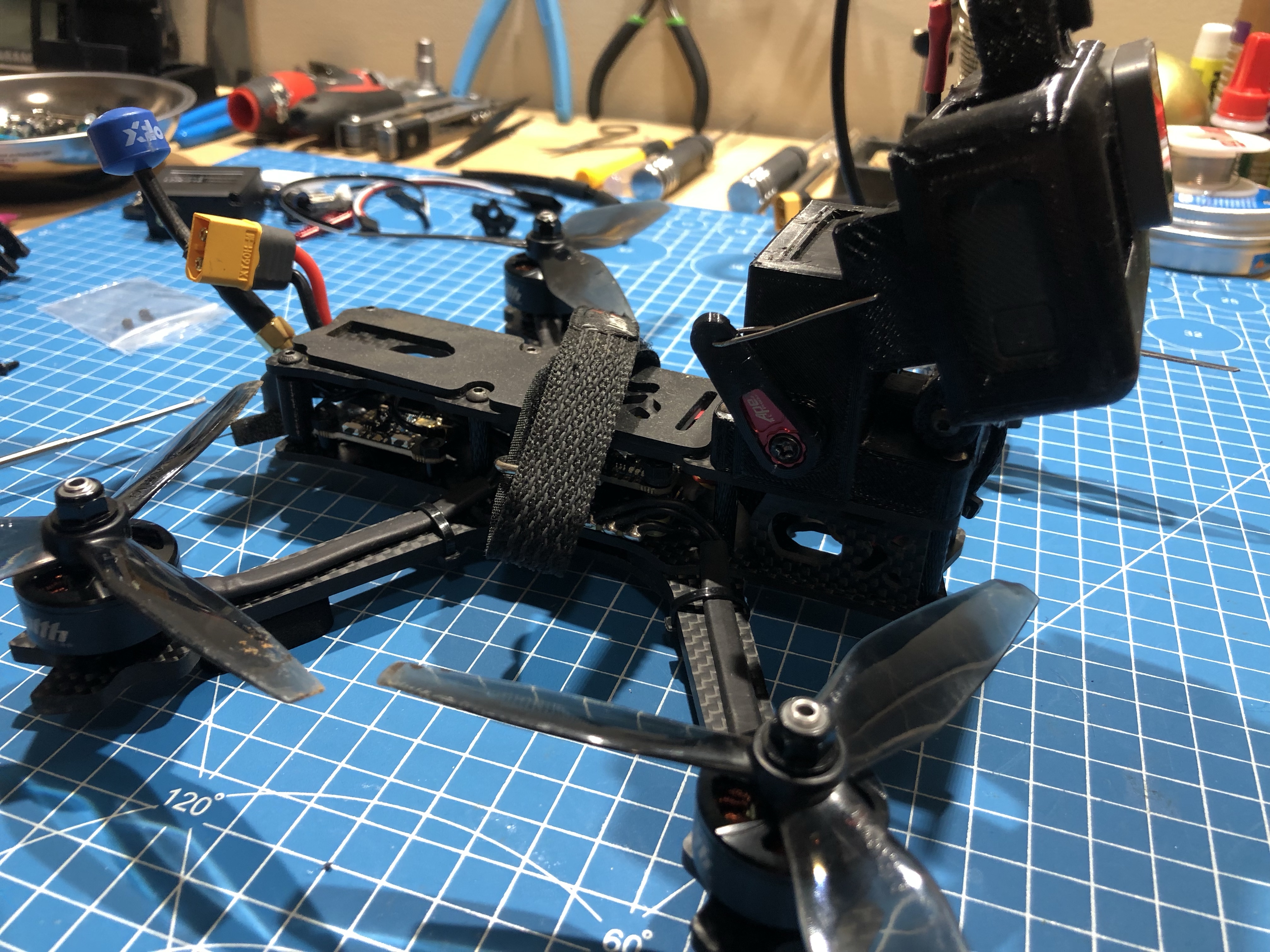
- The wire is designed to bend in a crash, as shown in the pictures bellow, this can easily be bent back in a few seconds and helps absorb energy in an impact and preserve other components including the servo.
- Uses a secondary axle for gimbal rotation, which can be positioned wherever desired to work best, allowing flexible application.
- If set up properly, this design can offer high strength, vibration resistance, and a large range of ratio/range configurations, as well as be very compact.
- The simplicity of the wire linkage means that repairing the system is easy.



These have been compelling reasons to continue using wire linkages, however I am currently testing other design options and may begin to adopt them if they show promising results in testing.
Steering Linkage:
Something like an adjustable RC car steering linkage comes to mind when considering an alternative to a wire linkage. A steering linkage gimbal design is almost identical to a wire linkage and for the most part you can switch from a wire linkage to a steering linkage with minimal or even no changes to the gimbal. The main advantages for this are quick adjustability and appearance, while some disadvantages are potential ‘slop’ in the linkage, weight, and ease of repair.

- Can be quickly and easily adjusted to be longer or shorter, allowing better fine-tuning.
- Look resilient and professional.
- Can have issues with ‘slop’ in the steering linkage because of third party quality control (have observed this in testing).
- Will break instead of bend.
- Steel wire is very strong for its weight, no adjustable steering linkage will compare in strength to weight of a steel wire.
Direct-Drive / On-Servo:
I have tested a direct-drive design to see if it could remove the need for linkages entirely and be as simple as possible. This has some significant advantages but does have some important disadvantages as well. For a more in-depth look check out this article.
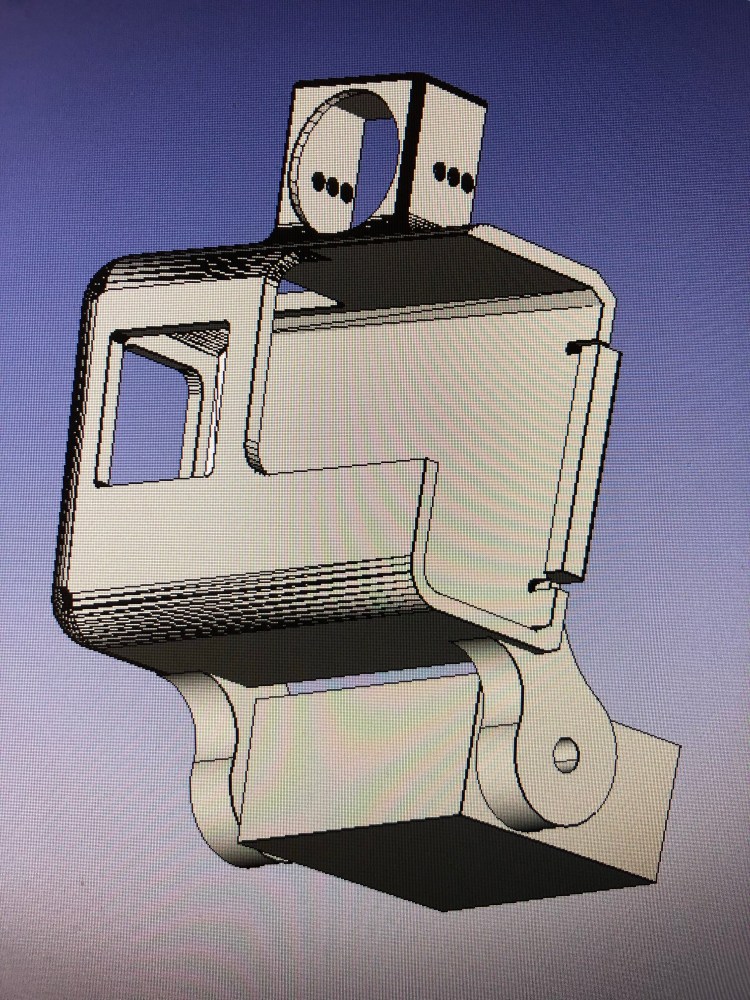



- Simple and easy to implement, not requiring any additional bearings or linkages.
- Non-variable ratio, which helps with simplicity of setup.
- Lighter overall and conserves space on the top plate.
- Aesthetics, which is subjective but I think it looks nice.
- Less smooth movement, due to the rotation axis being further from the camera.
- Camera sits higher when at a “traditional” upwards angle.
- Axis is further back than a secondary axle setup, this causes the camera to have more clearance issues when rotating downward
- More likely to break components due to the direct connection to the servo.
- Weight distribution, puts even more weight over the front motors.
Geared Drive:
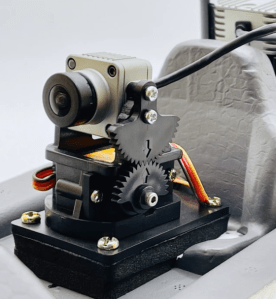
Gearing can be used between the servo and a secondary to move the gimbal. This could offer some of the advantages of both direct-drive and linkage, while having some unique disadvantages.
- Variable but consistent ratio, which helps with simplicity of setup.
- Weight distribution, the servo can be moved backwards towards the center of mass compared to direct-drive.
- Issues with durability, and ease of repair.

I am revisiting direct-drive options and testing steering linkages, as well as testing more servos. All of this testing is in an attempt to optimize performance, weight, durability, ease of setup and repair, size, and aesthetics. However, the current designs perform very well and are very durable, check out the store for kits and pre-builts!
UPDATE 10-24-2022:
I have now moved to a timing-belt design that has proven to be an excellent solution!
