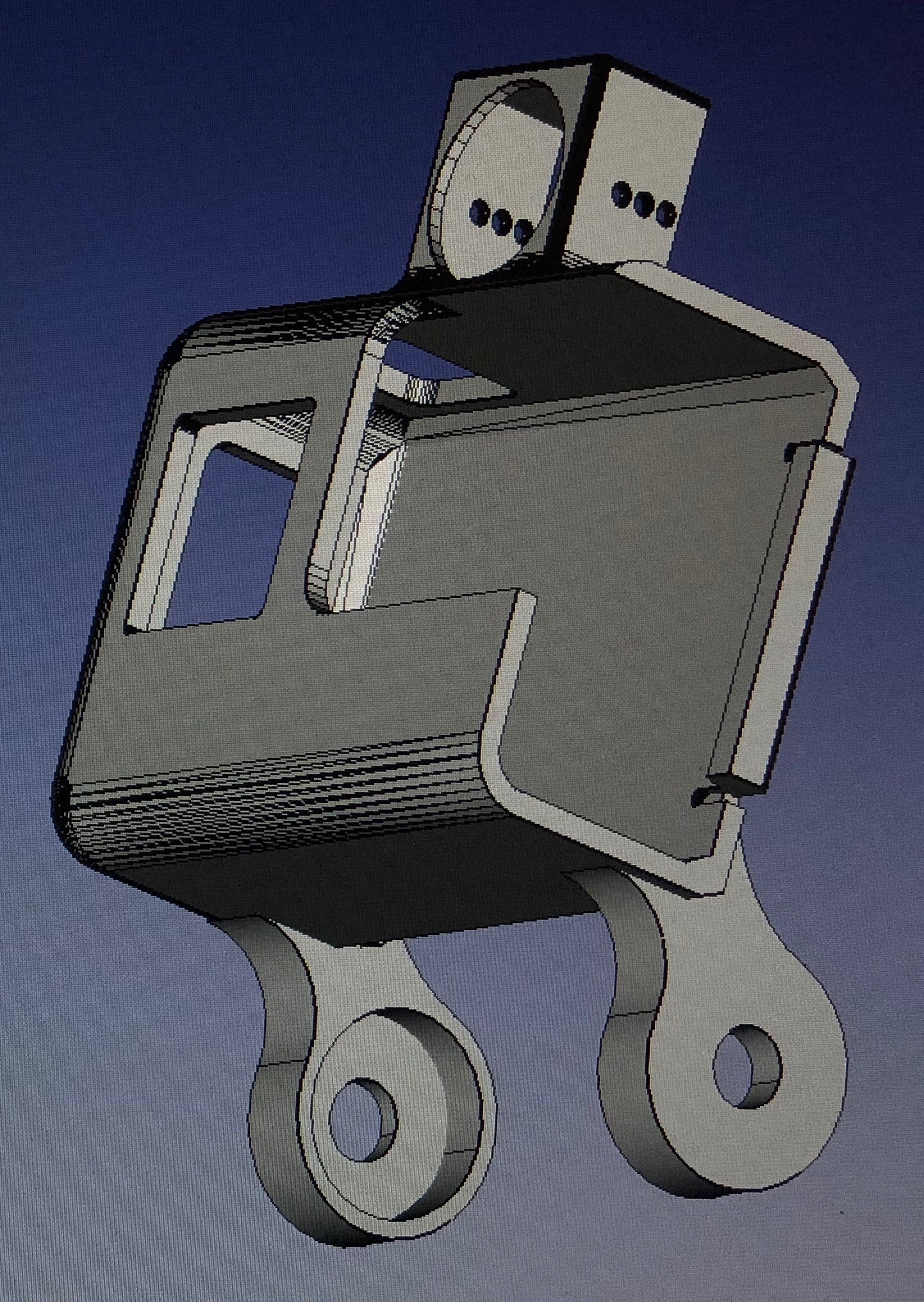
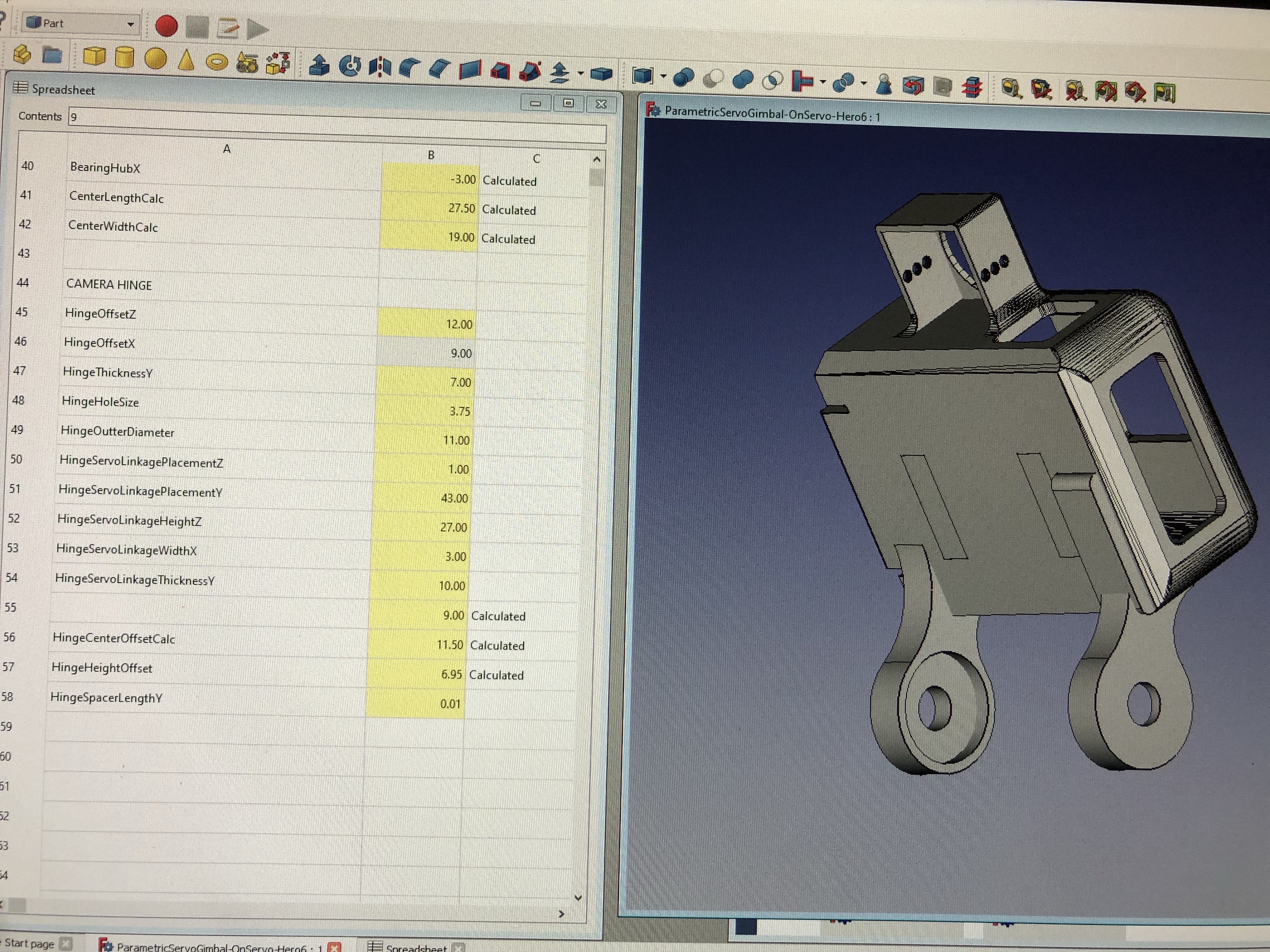
I have started tinkering with a design where the top “hinge” rotates directly on the servos axle instead of having a secondary axle and linkage. This would provide some advantages if it were able to produce smooth movement but will also have some notable disadvantages, worth testing though.

Will update post after initial testing.
Update: Gimbal movement was reasonably smooth although didn’t appear as smooth for the on-servo design as the secondary axle and linkage, however it seemed within an acceptable range for stabilization to remove. I intend to do more testing to confirm.



The following are my observed pros and cons of an on-servo design after initial testing.
Pros:
- Simple and easy to implement, not requiring any additional bearings or linkages
- Lighter overall and conserves space on the top plate
- Angle range is at least 10 degrees more than my current linkage setups
- Aesthetics, which is subjective but I think it looks nice
Cons:
- Less smooth movement, due to the rotation axis being further from the camera
- Axis is further back than a secondary axle setup, this causes the camera to have more clearance issues when rotating downward
- Ratio is non-adjustable, which could be considered a pro in terms of simplicity
- More likely to break components (untested assumption) due to the direct connection to the servo. A linkage setup will usually bend the linkage in a hard crash, which helps protect the other components (FPV camera, action camera, and servo)
- Weight distribution, puts even more weight over the front motors
- Camera sits higher when at a “traditional” upwards angle
The current design is for the Shen Drones Geyser and Squirt, analog video, and a Hero 5/6/7.
Files on Thingiverse: https://www.thingiverse.com/thing:4957923
