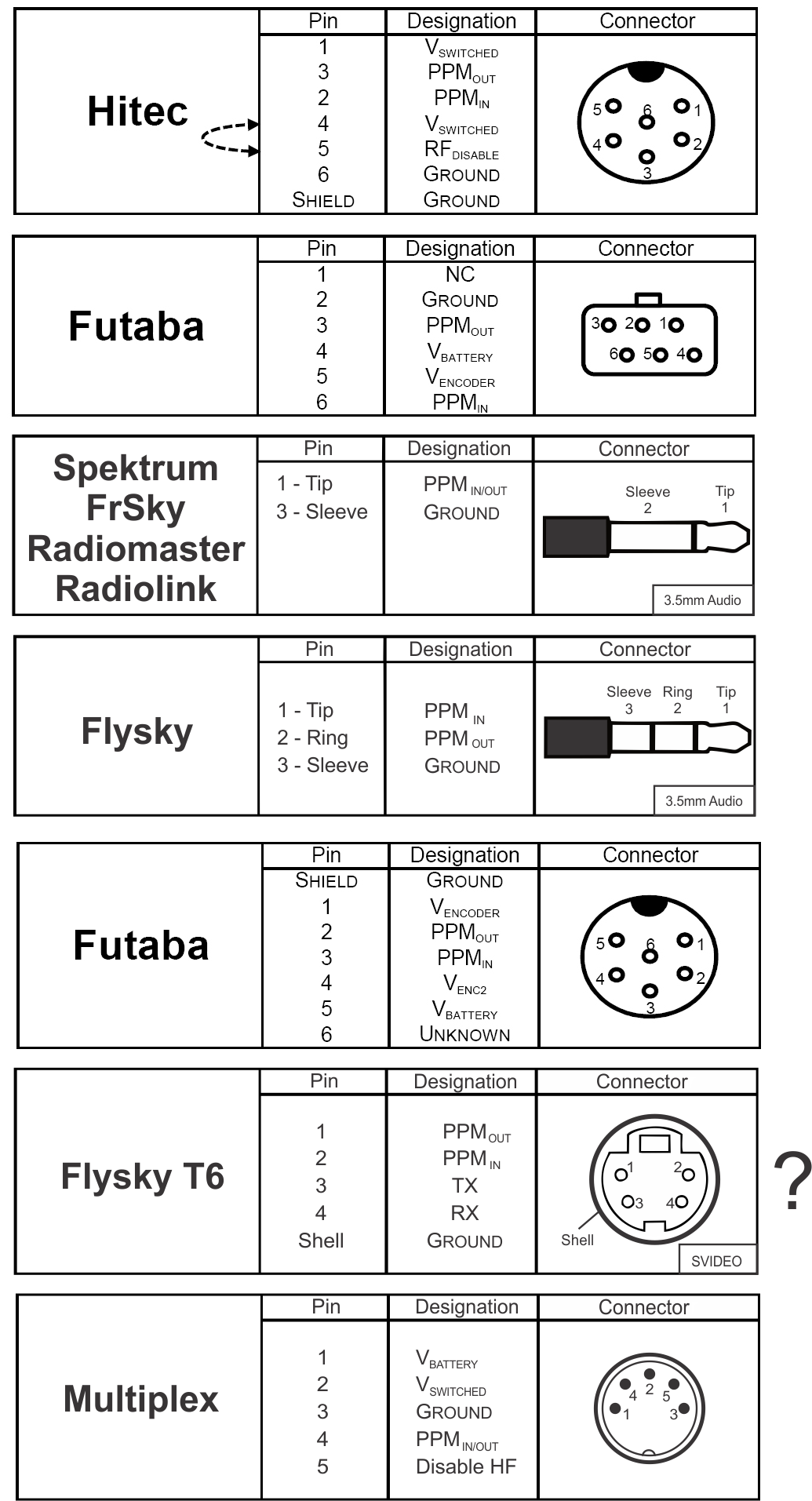
This tutorial is for adding a prebuilt or DIY head tracker to a FPV setup. Open-source firmware and configuration software can be found here and open-source designs by Medlin Drone can be found here. This should be applicable for any transmitter running OpenTX that has a 3.5mm auxiliary trainer port, there are SBUS and wireless options as well as Spektrum compatibility, but those are not covered in this tutorial, wireless in my experience doesn’t provide as good of a connection link as wired, and SBUS works but is less common on transmitters than a 3.5mm trainer port. More information about this open-source head tracker and setup can be found here. List of gear for my current setup here.
Known Supported Transmitters (3.5mm trainer port, other trainer ports described at bottom):
- Radiomaster TX16S, Zorro, etc.
- Jumper T12, T18, T8SG, etc.
- FrSky Taranis X9D, QX7, etc.
- Many Others (Check your transmitter manual)
What you’ll need:
- Head Tracker
- 6ft 3.5mm Auxiliary Cable
- Power for the head tracker (2s), this may require an extension cable or power splitter cable depending on how you build and mount your head tracker
Head Tracker Configuration:
Pre-built head trackers come preconfigured and calibrated, skip this section and move on to ‘Mounting’ if pre-built.
Download the latest release, open the GUI, upload the latest firmware, and calibrate your head tracker.
This is how I have mine configured, depending on how you orient your head tracker you may need to change settings, this is just an example. The configuration software can be downloaded here. I recommend using channels 6, 7, or 8.



Mounting:
Here is an example of my current setup, but there are many options for mounting. The only important thing is that the cables aren’t pulling on the head tracker during use, routing the auxiliary wire through the goggle strap is my current solution. It’s also helpful if the head tracker is not mounted diagonally, although you could fix that in the head tracker configuration Board Rotation section.
Configuration Steps:
- Connect the head tracker to the transmitter via the 3.5mm auxiliary cable, then power up the head tracker and transmitter (doesn’t matter which order).
- Press Model > Scroll to bottom of the Model Setup tab. Select Trainer > Mode > Master/Jack.

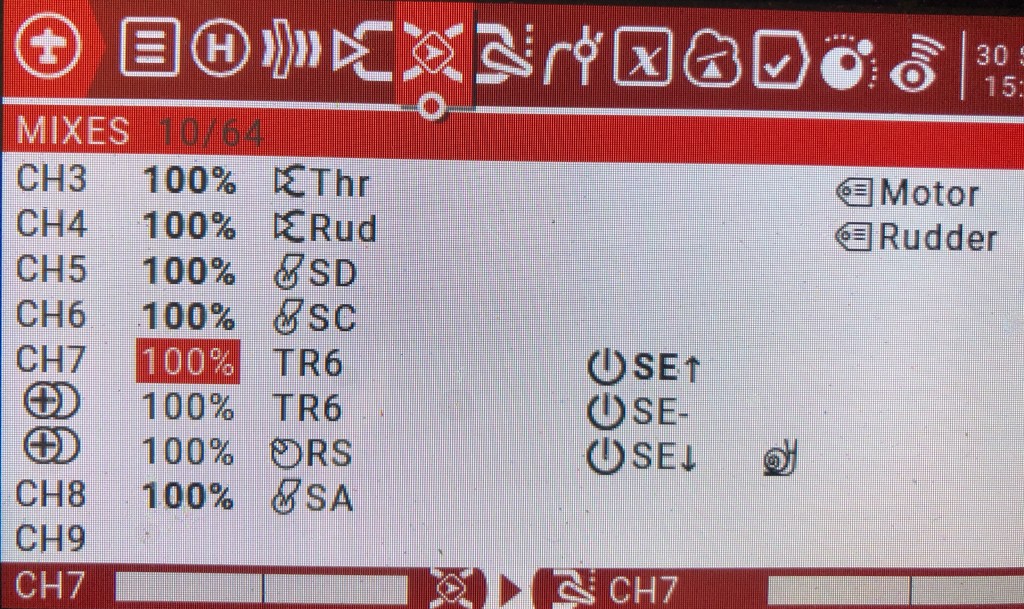
- Go to the Mixes tab and set whichever channel you want control of to one of the Trainer channels, I recommend using TR5, TR6, or TR7, this will correlate to your channel choice in the head tracker configuration software. Pre-built head trackers come preconfigured, with pitch, roll, and yaw set up on channels TR5-T7 (Early versions used TR6-TR8). For pitch control, use TR6 for DJI and Universal mounting and use TR7 for Fat Shark mounting.
- It is recommended to have a switch set up to change control of the channel from the trainer port to a slider on the transmitter, for both a backup control and for testing. To add this long press the mix with the Trainer input and select Insert After and create an additional mix that is only activated when a switch is flipped and have its input be a slider. Reference the following pictures.


- If your head tracker is configured correctly, you should now see the channel being controlled by the head tracker, click the centering button on the head tracker and if you don’t see it working cycle the power for the head tracker and also check the 3.5mm auxiliary plug both in the head tracker and the transmitter. Some transmitters, like the Radiomaster TX16S, have faulty auxiliary ports but this can usually be easily fixed. It may be helpful to use a y-splitter that stays plugged in to the transmitter and then plug and unplug the auxiliary cable into the y-splitter instead of the transmitter like in the picture bellow.
- Check that the movement you see is controlled by the correct axis and moves in the right direction (up/up down/down).


That’s it! If you have your gimbal set up this is a good time to test controlling it with the head tracker, otherwise the next step is to add a gimbal to you drone. Once you have done both of these, I recommend referencing the flight tips before your first flight.

Will this work with a spectrum dx6e that has wireless trainer on it I don’t see anywhere to hook up the trainer port?
LikeLike
I just looked up that model and I don’t see a trainer port for it either and it only lists Spectrums wireless trainer system which this head tracker isn’t compatible with (the head tracker is compatible with FrSky’s PARA Bluetooth trainer system though). There are many transmitters that are compatible.
LikeLiked by 1 person