Initial testing was more for the viability of a head tracking gimbal on a FPV drone than anything else, I had the idea several months back and after finishing some work on my home it was time to give it a shot and see if it would be flyable.
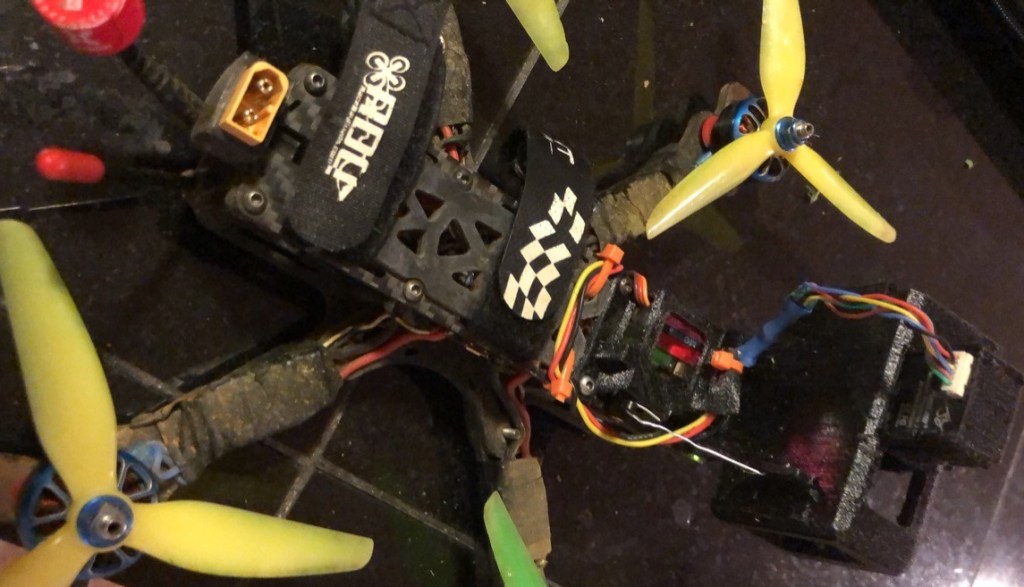
For initial testing I used the servo gimbal design made by Andy Shin for the Geyser, I used it on a TBS Source One, the screw holes were close enough to test.. My first test flights were without head tracking, just using a slider on the transmitter to control the gimbal (using my pinkie). This was tricky, but I tried to pull off one of the maneuvers I had in mind, where it was essentially a proximity line then orbit into a traditional cinematography “pull out” (via tilting the camera downwards and pitching backwards out of the orbit) and after some failed attempts I pulled off a rough version of it, in that moment I knew this could be game changing.
For a head tracker I opted to go with this DIY Head Tracker Build, the build was straight forward and the GUI made adjusting gain and other settings simple and intuitive, this is an amazing project and I cant give Cliff and Daniel enough thanks for creating this, I wouldn’t have been able to try this out as quickly as I was able to without this project. Also, thanks to Lee from Painless360 for his how-to video and designs for a DIY build.
After some practice and tuning this sub-system really showed promise in regards to flight experience and capabilities, even with the $5 analog servos. However, when I upgraded to expensive servos the jitters I had attributed to the cheap servo were still present, and led to my early designs.

One thought on “Early Testing”